

Husky is a medium sized robotic development platform. Its large payload capacity and power systems accommodate an extensive variety of payloads, customized to meet research needs. Stereo cameras, LIDAR, GPS, IMUs, manipulators and more can be added to the UGV by our integration experts. The Husky’s rugged construction and high-torque drivetrain can take your research where no other robot can go. Husky is fully supported in ROS with community driven Open Source code and examples.
FEATURES
EASY TO USE
Husky was the first field robotics platform to support ROS from its factory settings. Use Husky to integrate with existing research and build upon the growing knowledge base in the thriving ROS community to get started producing research results faster. Husky uses an open source serial protocol and we offer API support for ROS, and options for C++ and Python.
RUGGED & ALL-TERRAIN
Husky is an elegantly simple design built out of durable materials with very few moving parts. Its high-performance, maintenance-free drivetrain and large lug-tread tires allow Husky to tackle challenging real-world terrain. It will last for years of productive research.
A TRUSTED BENCHMARK
Husky is trusted by hundreds of researchers and engineers globally. Numerous research papers have been published using Husky as the test set-up. Husky provides a proven benchmark for establishing new robot research and development efforts.
PRECISION CONTROL
Husky has very high resolution encoders that deliver improved state estimation and dead reckoning capabilities. A finely tuned, yet user adjustable controller, offers incredibly smooth motion profiles even at slow speeds (<1cm/s) and with excellent disturbance rejection.
CUSTOMIZABLE
Our team of mobile robot experts can help you select and integrate payloads then configure the robot at the factory. Husky is plug-and-play compatible with our wide range of robot accessories and our system integrators will deliver a fully integrated turn-key robot.
TECH SPECS
SIZE AND WEIGHT
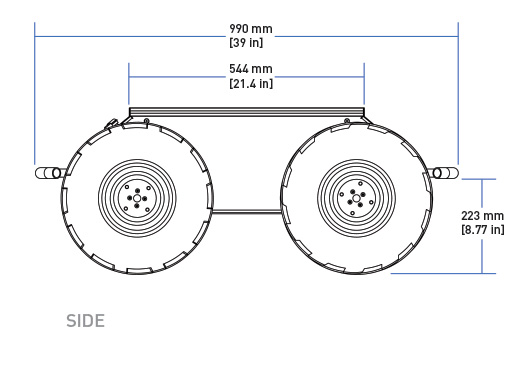
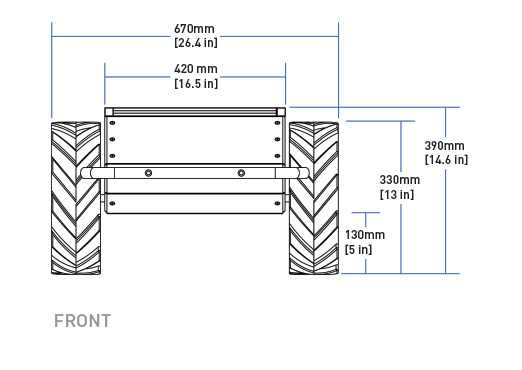
| EXTERNAL DIMENSIONS | 990 x 670 x 390 mm (39 x 26.4 x 14.6 in) |
|---|---|
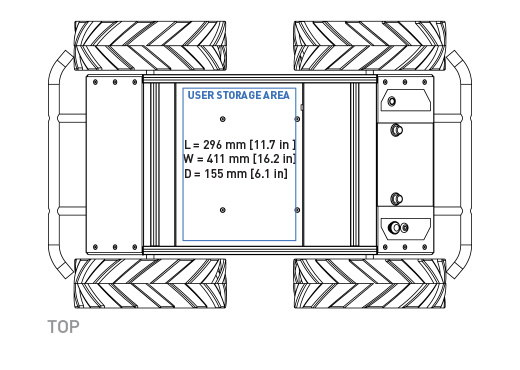
| INTERNAL DIMENSIONS | 296 x 411 x 155 mm (11.7 x 16.2 x 6.1 in) |
| WEIGHT | 50 kg (110 lbs) |
| MAX PAYLOAD | 75 kg (165 lbs) |
SPEED AND PERFORMANCE
| MAX SPEED |
1.0 m/s |
|---|---|
| RUN TIME (TYPICAL USE) |
3 hours |
| USER POWER |
5V, 12V and 24V fused at 5A each |
| DRIVERS AND APIS |
ROS Melodic, ROS Kinetic, C++ Library, Mathworks |