Description:
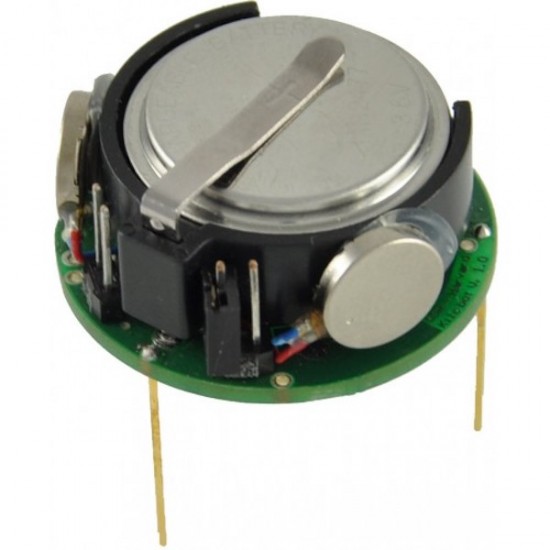
Kilobot is a low-cost, easy-to-use miniature robot designed for the development of “swarms” of robots that can be programmed to perform useful functions by coordinating interactions among many individuals. These swarms are inspired by social insects, such as ant or colonies, that can efficiently search for food sources in large complex environments, collectively transport large objects, and coordinate the building of nests and bridges in such environments.
Following this inspiration from nature, robot swarms might one day tunnel through rubble to find survivors, monitor the environment and remove contaminants, assist dwindling bee populations in pollinating crops, and self-assemble to form support structures in collapsed buildings. The Kilobot is designed to provide scientists with a physical testbed for advancing the understanding of collective behavior and realizing its potential to deliver solutions for a wide range of challenges.
Kilobots are low cost robots designed at Harvard University's Self-Organizing Systems Research Lab http://www.eecs.harvard.edu/ssr. The robots are designed to make testing collective algorithms on hundreds or thousands of robots accessible to robotics researchers.
Functional specifications of the Kilobot robot
The functional specifications of the Kilobot robot are as follows:
- Low cost
- Small, only 33mm of diameter
- Fine motor controlling (255 different power levels)
- The Kilobot can communicate with neighbors up to 7 cm.
- Neighbor-to-neighbor distance sensing
- Ambient light sensing
- RGB led
- Rechargeable and a movable battery
- Easy to manipulate, with the Kilobot controller software you can program and control hundreds of Kilobot at one time.
Note : the Kilobot Controller Board is mandatory to use, program and pilot the Kilotbot robots.
Technical specifications of the Kilobot
- Processor: AT mega 328 (8bit @ 8MHz)
- Memory: 32 KB Flash used for both user program and bootloader, 1KB EEPROM for storing calibration values and other non-volatile data and 2KB SRAM
- Battery: Rechargeable Li-Ion 3.7V, for a 3 months autonomy in sleep mode. Each Kilobot has a built-in charger, which charges the onboard battery when +6 volts is applied to any of the legs, and GND is applied to the charging tab.
- Charging: Kilobot charger (optional)
- Communication: Kilobots can communicate with neighbors up to 7 cm away by reflecting infrared (IR) light off the ground surface.
- Sensing: When receiving a message, distance to the transmitting Kilobot can be determined using received signal strength. The brightness of the ambient light shining on a Kilobot can be detected.
- Movement: Each Kilobot has 2 vibration motors, which are independently controllable, allowing for differential drive of the robot. Each motor can be set to 255 different power levels.
- Light: Each Kilobot has a red/green/blue (RGB) LED pointed upward, and each color has 3 levels of brightness control.
- Dimensions: The diameter is 33 mm and the height is 34mm (including the legs)
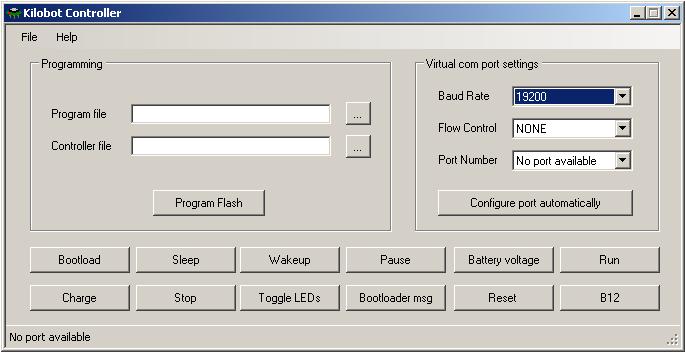
- Software: The Kilobot Controller software is available for controlling the controller board, sending program files to the robots and controlling them.
- Programming: For programming, the open source development software WinAVR combinated with AvrStudio from Amtel gives a C programming environment. An API with basic functions such as motor speed, led control, distance measurement,... is available and some examples are provided.
- Debug: A serial output header is available on each robot for debugging via computer terminal.
Programming the KiloBot robots
The open source development software WinAVR combinate with AvrStudio from Atmel gives a C programming environment. An API with basic functions such as motor speed, led control, distance measurement,... is available and some examples are provided.
The Kilobot Controller software (picture below) is available for controlling the controller board, sending program files to the robots and controlling them.