
Turtlebot3 Burger, new Robotis programmable robot
Affordable price, small size, more scalability, full Open Source support, and more...
TurtleBot3 Burger is a new generation mobile robot that is modular, compact and customizable, just like its sidekick the Waffle. This new programmable robot from Robotis includes a Raspberry Pi 3, with which the robot can run ROS and Ubuntu (the first open-source operating system for PCs, connected objects...). It has a software that runs on Apache 2.0 and runs completely in Open Source. Another interesting aspect is its open CR operation. This means that it is possible to print the elements in 3D or to buy them ready for assembly. Turtlebot3 Burger works with the latest versions of Ubuntu Linux (13.04.2 LTS) and ROS (Kinetic). It uses single-card computer interfaces with a control panel. In addition to using ROS to control the robot, you can also program additional behaviors using the C/C+ functions and Arduino libraries.
- Popular ROS platform: TurtleBot is the most popular open source learning and search robot in the world.
- TurtleBot is the most widely available platform for training, development and prototyping.
- Compact: The small size of the robot is a distinctive feature.
- Possibilities for improvement: Different sensors, motors, a single board computer, a modular box will allow you to realize all your ideas.
- Modular servo drive: The servo drive is easy to install, replace and reconfigure.
- Free Software: The user has access to a variety of free software and can modify the source code.
- Open equipment: Accessories (circuits, printed circuit boards) are in the public domain.
- Powerful sensors: The robot is equipped with a 360° laser rangefinder (LiDAR), a 9-axis gyrostabilizer (IMU) and a high-precision encoder.
The magic of Turtlebot3 is hidden in the floors
It is important to know that all the sensors offered by Robotis work on the Turtlebot3 Burger. It is entirely possible for you to connect it to other sensors: motion, temperature, color, contact.... Its structure is also completely modular, which will allow you to give it the look you want, let your imagination run wild! Both TurtleBot3 models are equipped with a lidar, which allows them to do SLAM (simultaneous mapping and localization) and autonomous navigation.
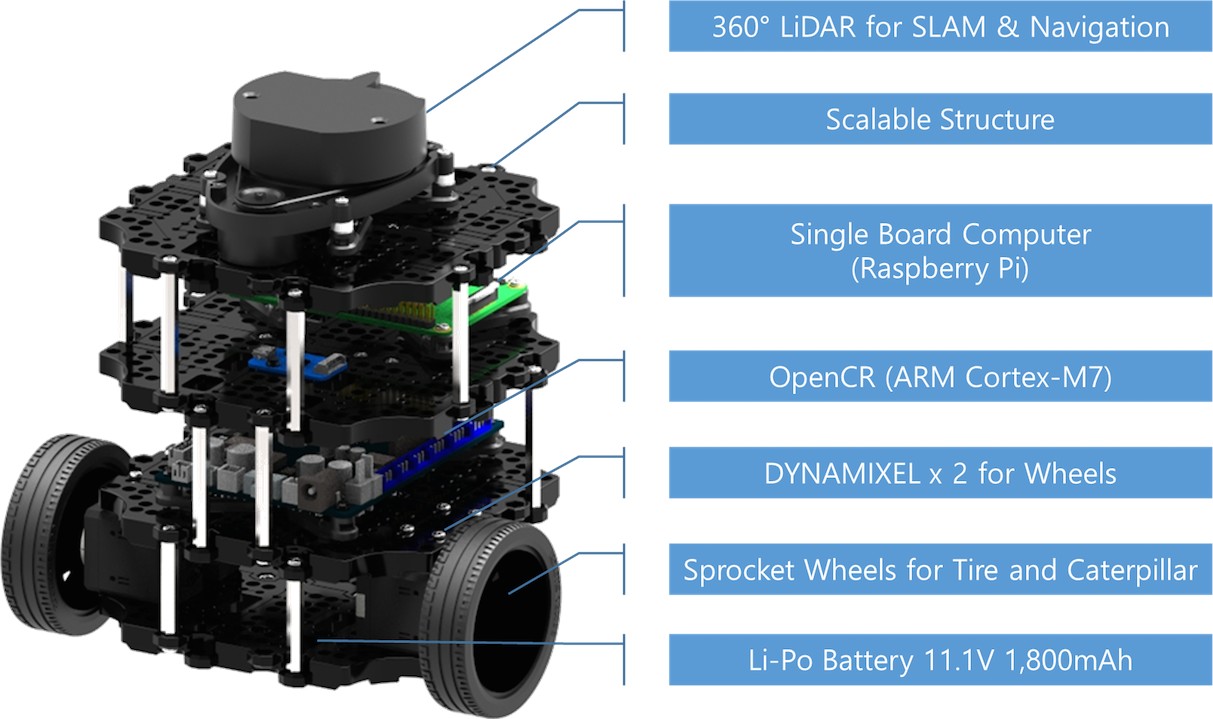
- The first floor of the Burger contains the Dunamixel XL430 servors and the battery.
- The second one has a controller.
- The Raspberry Pi is located on the third floor.
- At the top of TurtleBot3 Burger, you will find the 360 degree lidar, just like the Waffle.
To fully build the Turtlebot3 Burger, it will take between 1 to 2 hours, half as long as the Robotis Turtlebot3 Waffle. Note that this is a robot to learn ROS and acquire advanced knowledge of robotics and computing..
Feature of Robotis educational robot TurtleBot3
The Robotis Turtlebot3 Burger is composed of :
- An embedded computer (Raspberry Pi3) and its cable
- An Open Source ARM Cortex-M7 OpenCR control board (programmable with the Arduino IDE)
- One chassis four Dynamixel X series servomotors (2 servomotors in each wheel)
- Two USB cables two connection cables for Dynamixel and Open CR
- Navigation sensors: a gyroscope, an accelerometer and a 3-axis magnetometer, a lithium polymer battery (11.1 V 1800 mAh/19.98 Wh 5C) and an extension cable
- Assembly tools (179 parts).
Some additional information:
- Charging time: 2h30
- Maximum payload: 15 kg
- Maximum travel speed: 0.22 m / s.
- Maximum threshold height: 10 mm
- Maximum rotational speed: 2.84 rad / s. (167.72 deg / s.
- Size (L x W x H): 138 mm x 178 mm x 192 mm
- Total weight (including SBC, battery and sensors): 1 kg
TurtleBot 3 Burger robot components in detail:
- 1x Raspberry ft 3
- 1x OpenCR
- 8x Waffle trays
- 2x wheels
- 2x tires
- 1x HLS-LFCD2
- 1x Li-Po Battery
- 2x DYNAMIXEL (XL430)
- 2x USB cables
- 2x connection cable for Dynamixel and Open CR
- 1x Raspberry Pi 3 Power cable
- 1x Li-Po battery extension cable
- 1x ball castors
- 1x USB2LDS
- 179x assembly tools
Feel free to browse through all of our educational robots!