

Description:
Tutlebot3 Waffle Pi: an affordable and extensible ROS platform
The TurtleBot3 series by Robotics offers a range of open-source robotics platforms that are programmable on ROS, and highly powerful and performing despite their small size and low price. These mobile robots are equipped with a full autonomous navigation system, 2 servos, a motion controller, and a microcontroller. The TurtleBot3 Waffle Pi, the latest addition to the family, consists in a set of mechanical and electronic parts that you can assemble on your own, just like its big brothers. All the necessary nuts and bolts are included.
A new version of the TurtleBot3 Waffle
The differences between the Waffle and Waffle Pi versions may be subtle, but they won’t go unnoticed. While the TurtleBot3 Waffle offers an Intel® Joule™ SBC microcontroller, the TurtleBot3 Waffle on Raspberry Pi, as its name indicates, is built on the Raspberry Pi 3. This offers you the possibility to connect all your compatible modules, starting with the Raspberry Pi camera (mount included): you can control your robot remotely and record footage as if you were there.
The TurtleBot3 Waffle comes with 2 RS-485 interfaced Dynamixel servos, while the Waffle Pi uses a TTL interface.
Technical specifications of the TurtleBot3 Waffle Pi robot
- Max. translational velocity: 0.26 m/s
- Max. rotational velocity: 1.82 rad/s (104.27°/s)
- Maximum payload: 30 kg
- Dimensions: 281 x 306 x 141 mm
- Weight (with programming board, battery and sensors): 1.8 kg
- Operating time: about 2 h
- Charging time: about 2 h 30 m
- 2 Dynamixel XM430-W210-T servos
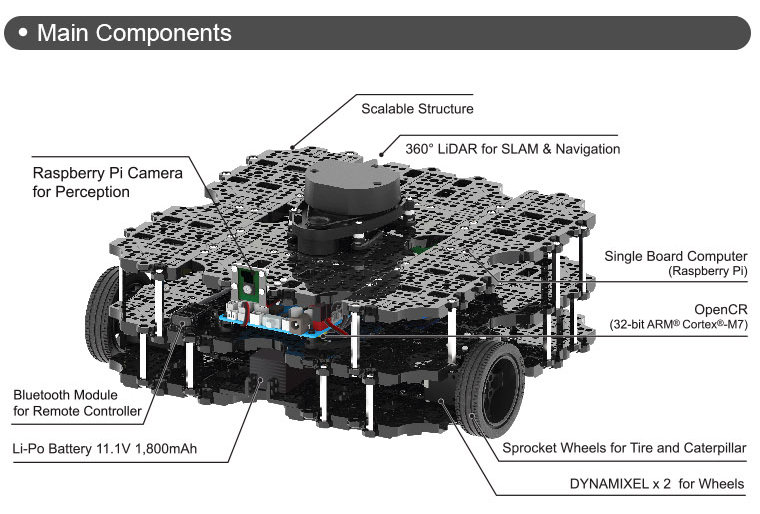
- Microcontroller: Raspberry Pi 3
- Embedded controller: Open-CR (32-bit ARM® Cortex®-M7)
- Sensors:
- Raspberry Pi camera
- LiDAR 360° LDS-01
- 3-axis gyroscope
- 3-axis accelerometer
- 3-axis magnetometer